Construa seu próprio robô esteira com Arduino! – Handler V1.0
Desde criança robôs esteiras me fascinam, e é por isso que hoje vamos aprender a construir um barra pesada! Neste tutorial você irá encontrar o passo a passo completo de como construir desde a parte mecânica até a programação.
Este tutorial já está completo, e todas as informações que você precisa para montá-lo, como substituições, tipo das peças, medidas, valor aproximado, está tudo aqui. Não vendemos robôs ou componentes eletrônicos, e também não fazemos projetos externos.
Todos os arquivos que você precisará baixar para construir seu robô estão aqui embaixo:
- Desenho 3D do Handler ( Versão Sketchup 2017) Arquivo compactado .zip – Clique aqui
- Download do Sketchup para visualizar e editar o desenho em 3D do Handler – Clique aqui
https://www.sketchup.com/pt-BR/plans-and-pricing/sketchup-free
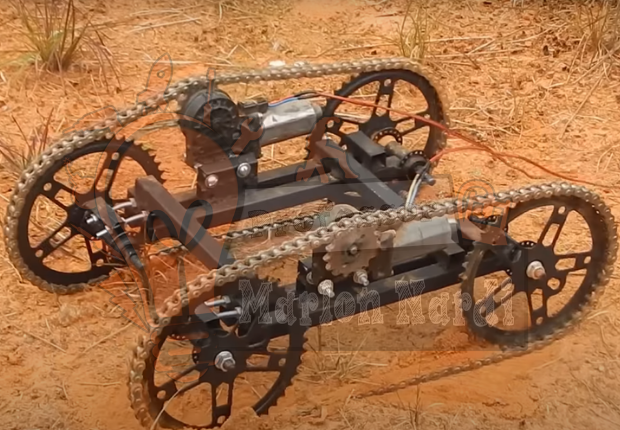
Lista de peças mecânicas do robô esteira Handler V1.0
- 2 Motores de vidro elétrico;
- 4 Coroas simples de bicicleta;
- 4 Cubos dianteiros simples de bicicleta;
- 2 Correntes de moto usadas ou novas;
- 4 Metros de Metalon 20 x 20 cm;
- 12 Parafusos a sua escolha;
- 34 Porcas para o parafuso escolhido acima;
- 44 Arruelas para o parafuso escolhido acima;
- 2 Pinhões de CG TITAN 15 dentes;
- 4 Ruelas de diâmetro externo: 33 mm e diâmetro interno de 9,5 mm (Se não achar, pode comprar uma com diâmetro interno menor e aí você fura para aumentar).
Outras ferramentas utilizadas:
- Máquina de solda;
- Esmerilhadeira;
- Furadeira;
- Alicates em geral;
- Chaves em geral.
Agora vamos para a parte eletrônica e de programação!
Lista de componentes, shields e módulos:
- 1 Arduino MEGA;
- 2 Transceptores NRF24L01 + PA +LNA;
- 1 Monster Motor Shield;
- 18 Células Li-Ion 4.2V x 2000mAh para a bateria do robô;
- 2 Células Li-Ion 4.2V x 2000mAh para o receptor e o controle;
- 1 Controle XBOX.
Para baixar o diagrama esquemático do circuito eletrônico do Handler V1.0 – Clique aqui.
Para poder compilar as programações abaixo você precisa baixar e instalar na IDE do Arduino essa biblioteca – Clique aqui.
Programação do transmissor:
/*************************** Marlon Nardi ******************************
Projeto: Programação do Controle Handler V1.0
Vídeo ensinando a montar: https://www.marlonnardi.com/p/construa-seu-proprio-robo-esteira_23.html
Loja: https://www.lojamarlonnardi.com/
Site: https://www.marlonnardi.com/
Youtube: https://www.youtube.com/marlonnardiw
Facebook: https://www.facebook.com/professormarlonnardi
************************************************************************/
/******************* Programação do Controle Handler V1.0 ***************/
//======================= Incluindo bilbiotecas ==============================//
#include <SPI.h>
#include <RF24.h>
//========================= Criando objetos =================================//
RF24 Radio(48, 49); // CE, CSN // Instancia/cria o objeto Radio para que possamos trabalhar com ele. Também temos que informar os pinos do Arduino conectados ao CE e ao CSN do NRF24L01.
//==================== Nomeando as constantes ==============================//
#define LEDIndicadorRadicaoGama 22
#define AnalogicoEsquerdoY A0// 0 à 950
#define AnalogicoDireitoX A1
#define BotaoL1 A2 // 0 ou 1023
#define AnalogicoL2 A3// 0 à 1023
#define AnalogicoEsquerdoX A4// 80 à 1023 Meio 511
#define AnalogicoR2 A5 // 13 à 1023
//=================== Criando uma estrutura/pacote de dados para a transmissão e recepção de informação através de dois Pipes =======================//
struct EstruturaDadosTXRX
{
boolean SensorRadiacaoGama = false;
int ValorConvertidoAnalogicoR2 = 0;
int DirecaoRobo = 0;
};
typedef struct EstruturaDadosTXRX TipoDosDadosTXRX;
TipoDosDadosTXRX DadosTransmitidos;
TipoDosDadosTXRX DadosRecebidos;
//=================== Declaração de variáveis globáis =======================//
int ValorAnalogicoR2;
int ValorAnalogicoEsquerdoY;
int ValorAnalogicoEsquerdoX;
boolean EstadoBotao = 0;
//=================== Declaração da variável global somente de leitura para armazenas os endereço de leitura e escrita =======================//
//Endereço: 0 1
const byte Enderecos[][6] = {"00001", "00002"}; //Criamos um vetor constante do tipo Byte que terá duas posições, pois precisamos de um endereço para escrever e outro para ler. Apesar do
//endereço ter somete 5 números, declaramos 6 para que o comppilador adicione o caracter null \0 automaticamente.
void setup() {
//==================== Declaração de entradas e saídas ========================//
pinMode(LEDIndicadorRadicaoGama, OUTPUT);// Declara o pino do LEDIndicadorRadicaoGama como saída.
//================== Configurações iniciais do NRF24L01 ======================//
Radio.begin();// Inicia o transceptor NRF24L01
Radio.openWritingPipe(Enderecos[1]); // Informamos para o transceptor qual é o endereço de escrita Enderecos[1] ou 00002 e abrimos o Pipe/Tubo.
Radio.openReadingPipe(1, Enderecos[0]); // Informamos para o transceptor qual é o endereço de leitura Enderecos[0] ou 00001 e abrimos o Pipe/Tubo. Esse primeiro parâmentro, o número 1,
//define o número do Pipe. Podemos utilizar 6 Pipes, de 0 à 5.
Radio.setPALevel(RF24_PA_MAX);// Muda o PA para potência máxima de transmissão. Para potência minima: RF24_PA_MIN Para potência média: RF24_PA_HIGH Para potência máxima (recomendado para o módulo com etapa amplificadora e antena): RF24_PA_MAX
Radio.setDataRate(RF24_250KBPS); // Mudamos a taxa de trasnferência de dados para 250 Kbps, isso melhora a distância na transmissão.
}
void loop() {
delay(5);// Tempo para não haver perca de dados
//========================= Trasmitindo os dados ===========================//
ValorAnalogicoEsquerdoX = analogRead(AnalogicoEsquerdoX);// Lê o valor analógico do AnalogicoEsquerdoX e manda para a variável ValorAnalogicoEsquerdoX.
ValorAnalogicoEsquerdoY = analogRead(AnalogicoEsquerdoY);// Lê o valor analógico do AnalogicoEsquerdoY e manda para a variável ValorAnalogicoEsquerdoY.
//Robô para Trás
if (ValorAnalogicoEsquerdoX < 471) {
DadosTransmitidos.DirecaoRobo = 2;
}
//Robô para Frente
if (ValorAnalogicoEsquerdoX >= 490) {
DadosTransmitidos.DirecaoRobo = 3;
}
//Vira o robô para a direita
if (ValorAnalogicoEsquerdoY <= 482) {
DadosTransmitidos.DirecaoRobo = 0;
}
//Vira o robô para a esquerda
if (ValorAnalogicoEsquerdoY >= 562) {
DadosTransmitidos.DirecaoRobo = 1;
}
ValorAnalogicoR2 = analogRead(AnalogicoR2);
DadosTransmitidos.ValorConvertidoAnalogicoR2 = map(ValorAnalogicoR2, 13, 1023, 0, 255);
Radio.stopListening(); // Comando para o rádio parar de ouvir, dessa forma ele fala ou transmite.
Radio.write(&DadosTransmitidos, sizeof(TipoDosDadosTXRX));// Transmite/escreve os dados para o outro rádio. DadosTransmitidos = Informação que queremos enviar. TipoDosDadosTXRX: Tamanho dessa variável.
//========================= Recebendo os dados ===========================//
delay(5);// Tempo para não haver perca de dados.
Radio.startListening(); // Comando para o rádio começar ouvir, dessa forma ele escuta ou recebe.
while (!Radio.available()); //Fica em looping até receber a informação.
Radio.read(&DadosRecebidos, sizeof(TipoDosDadosTXRX)); // Lê a informação transmitida pelo Robô.
if (DadosRecebidos.SensorRadiacaoGama == HIGH) {// Se DadosRecebidos.SensorRadiacaoGama que foi transmitido pelo robô for igual a HIGH.
digitalWrite(LEDIndicadorRadicaoGama, HIGH);// Liga o LEDIndicadorRadicaoGama
}
else {// Se não
digitalWrite(LEDIndicadorRadicaoGama, LOW);// Desliga o LEDIndicadorRadicaoGama
}
}
Programação do receptor:
/*************************** Marlon Nardi ******************************
Projeto: Programação do Robô Handler V1.0
Vídeo ensinando a motar: https://www.marlonnardi.com/p/construa-seu-proprio-robo-esteira_23.html
Loja: https://www.lojamarlonnardi.com/
Site: https://www.marlonnardi.com/
Youtube: https://www.youtube.com/marlonnardiw
Facebook: https://www.facebook.com/professormarlonnardi
************************************************************************/
/******************* Programação do Robô Handler V1.0 ****************/
//======================= Incluindo bilbiotecas ==============================//
#include <SPI.h>
#include <RF24.h>
//========================= Criando objetos =================================//
RF24 radio(48, 49); // CE, CSN // Instancia/cria o objeto Radio para que possamos trabalhar com ele. Também temos que informar os pinos do Arduino conectados ao CE e ao CSN do NRF24L01.
//==================== Nomeando as constantes ==============================//
#define PinoSensorRadiacaoGama 22
//=================== Criando uma estrutura/pacote de dados para a transmissão e recepção de informação através de dois Pipes =======================//
struct EstruturaDadosTXRX
{
boolean SensorRadiacaoGama = false;
int ValorConvertidoAnalogicoR2 = 0;
int DirecaoRobo = 0;
};
typedef struct EstruturaDadosTXRX TipoDosDadosTXRX;
TipoDosDadosTXRX DadosTransmitidos;
TipoDosDadosTXRX DadosRecebidos;
//=================== Declaração de variáveis globáis =======================//
boolean buttonState = 0;
//=================== Declaração da variável global somente de leitura para armazenas os endereço de leitura e escrita =======================//
//Endereço: 0 1
const byte Enderecos[][6] = {"00001", "00002"};//Criamos um vetor constante do tipo Byte que terá duas posições, pois precisamos de um endereço para escrever e outro para ler. Apesar do
//endereço ter somete 5 números, declaramos 6 para que o comppilador adicione o caracter null \0 automaticamente.
void setup() {
//==================== Declaração de entradas e saídas ========================//
pinMode(PinoSensorRadiacaoGama, INPUT_PULLUP);// Declara o pino do PinoSensorRadiacaoGama como entrada PULLUP.
// Pinos para o controle dos motores através da Monster Shield
pinMode(4, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
//================== Configurações iniciais do NRF24L01 ======================//
radio.begin();// Inicia o transceptor NRF24L01
radio.openWritingPipe(Enderecos[0]); // Informamos para o transceptor qual é o endereço de escrita Enderecos[0] ou 00001 e abrimos o Pipe/Tubo.
radio.openReadingPipe(1, Enderecos[1]); // Informamos para o transceptor qual é o endereço de leitura Enderecos[1] ou 00002 e abrimos o Pipe/Tubo. Esse primeiro parâmentro, o número 1,
//define o número do Pipe. Podemos utilizar 6 Pipes, de 0 à 5.
radio.setPALevel(RF24_PA_MAX); // Muda o PA para potência máxima de transmissão. Para potência minima: RF24_PA_MIN Para potência média: RF24_PA_HIGH Para potência máxima (recomendado para o módulo com etapa amplificadora e antena): RF24_PA_MAX
radio.setDataRate(RF24_250KBPS); // Mudamos a taxa de trasnferência de dados para 250 Kbps, isso melhora a distância na transmissão.
}
void loop() {
//========================= Recebendo os dados ===========================//
delay(5); // Tempo para não haver perca de dados.
radio.startListening(); // Comando para o rádio começar ouvir, dessa forma ele escuta ou recebe.
if ( radio.available()) {// Se o NRF24L01 receber dados.
while (radio.available()) {// Enquanto o NRF24L01 receber dados.
radio.read(&DadosTransmitidos, sizeof(TipoDosDadosTXRX)); // Lê a informação transmitida pelo Robô.
}
//========================= Controle dos Motores ===========================//
//Controle da velocidade dos motores
analogWrite(5, DadosTransmitidos.ValorConvertidoAnalogicoR2); // Escreve o valor PMW de 0 à 255 responsável pela velocidade do robô no pino 5.
analogWrite(6, DadosTransmitidos.ValorConvertidoAnalogicoR2);// Escreve o valor PMW de 0 à 255 responsável pela velocidade do robô no pino 6.
//Controle da direção do robô
if (DadosTransmitidos.ValorConvertidoAnalogicoR2 < 50) {
//---------------- Robô Desligar Motores -----------//
//Motor lado esquerdo olhando de trás do robô
digitalWrite(4, LOW);
digitalWrite(9, LOW);
//Motor lado direito olhando de trás do robô
digitalWrite(7, LOW);
digitalWrite(8, LOW);
}
if (DadosTransmitidos.DirecaoRobo == 3) {
//---------------- Robô para frente -----------//
//Motor lado esquerdo olhando de trás do robô
digitalWrite(4, LOW);
digitalWrite(9, HIGH);
//Motor lado direito olhando de trás do robô
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
}
if (DadosTransmitidos.DirecaoRobo == 2) {
//---------------- Robô para trás -----------//
//Motor lado esquerdo olhando de trás do robô
digitalWrite(4, HIGH);
digitalWrite(9, LOW);
//Motor lado direito olhando de trás do robô
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
}
if (DadosTransmitidos.DirecaoRobo == 0) {
//---------------- Robô para o lado esquerdo -----------//
//Motor lado esquerdo olhando de trás do robô
digitalWrite(4, HIGH);
digitalWrite(9, LOW);
//Motor lado direito olhando de trás do robô
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
}
if (DadosTransmitidos.DirecaoRobo == 1) {
//---------------- Robô para o lado direito -----------//
//Motor lado esquerdo olhando de trás do robô
digitalWrite(4, LOW);
digitalWrite(9, HIGH);
//Motor lado direito olhando de trás do robô
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
}
}
//========================= Trasmitindo os dados ===========================//
delay(5); // Tempo para não haver perca de dados.
radio.stopListening(); // Comando para o rádio parar de ouvir, dessa forma ele fala ou transmite.
DadosRecebidos.SensorRadiacaoGama = digitalRead(PinoSensorRadiacaoGama);// Faz a leitura digital do PinoSensorRadiacaoGama e armazena na variável DadosRecebidos.SensorRadiacaoGama.
radio.write(&DadosRecebidos, sizeof(TipoDosDadosTXRX));// Transmite/escreve os dados para o outro rádio. DadosTransmitidos = Informação que queremos enviar. TipoDosDadosTXRX: Tamanho dessa variável.
}
Explicação em vídeo da parte eletrônica do Robô:
Passo a passo em vídeo da programação:
Espero que se divirta muito construindo seu robô!
Um grande abraço,
Marlon Nardi.

