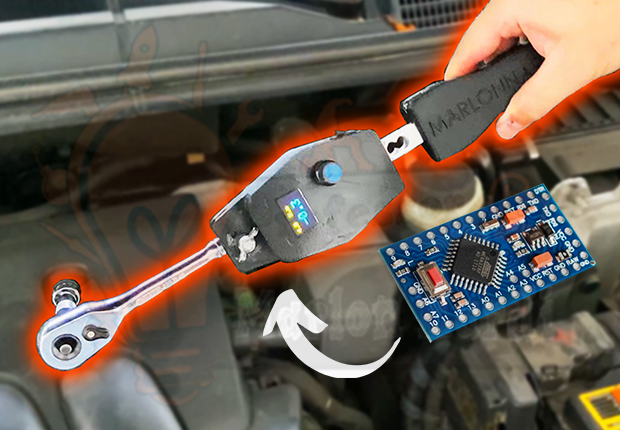
Faça um torquímetro com Arduino Super barato!
Atualizações:
22/05/2022 – Nova versão V2 do desenho 3D disponível para baixar com diversas melhorias que você pode ver na página de download no ThingiVerse.
Nesse artigo vou te mostrar um projeto incrível de um torquimetro de baixo custo e preciso feito com Arduino! Aqui tem tudo que é necessário para você montar o seu próprio torquímetro e utilizar na sua casa ou oficina. O custo aproximado é de 150,00 reais somente, o que comparado a produtos comercialmente disponíveis é BEM abaixo.
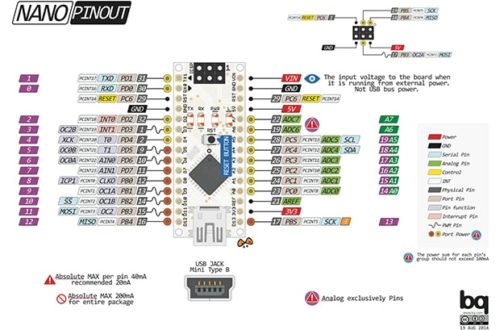
O Arduino Pro Mini utilizado no projeto é o de 8 Mhz com o microcontrolador Atmega328P. Escolhi essa frequência ao invés de 16Mhz porque assim o microcontrolador pode trabalhar de forma confiável em tensões mais baixas de 2.7V até 5.5V. Isso é fundamental para alimentar o circuito diretamente com uma célula de Li-Ion 18650 (2,75V até 4,2V) sem a necessidade de utilizar um conversor DC-DC, o que deixaria o circuito mais caro e menos eficiente.
Para 16Mhz a tensão mínima para que o microcontrolador funcione de forma confiável é de 4.5V aproximadamente (datasheet). A variação de tensão da descarga da bateria não irá afetar a precisão do torquimetro de forma significativa, pois o módulo conversor A/D HX711 regula sua própria tensão de referência, e ela é relativamente estável.
O torque máximo que pode ser aplicado ao torquimetro com uma célula de carga de 20kg, e considerando as medidas do corpo impresso em 3D, segundo meus cálculos é de 4.7Kgf.m ou 47N.m. Porém, limitei o projeto na programação a 3Kgf.m ou 30N.m, para deixar uma folga para a célula de carga e principalmente não danificar a estrutura impressa em 3D. Não recomendo aplicar mais que 3Kgf.m ou 30N.m na estrutura impressa em 3D com PLA. Se você quiser aumentar o torque do projeto da para construir a estrutura do torquímetro de metal, utilizar uma célula de carga com maior capacidade de força e modificar os cálculos na programação.
A seguir temos a lista de materiais necessários:
- 1 – Arduino Pro Mini 8 Mhz;
- 1 – Módulo Display OLED I2C 128 x 64 0,96 INCH;
- 1 – Módulo Encoder Rotativo KY-040;
- 1 – Célula de Carga de 20KG;
- 1 – Módulo para leitura de Célula de Carga HX711;
- 1 – Bateria 18650 da capacidade desejada, eu utilizei 1A.h;
- 1 – Módulo de carga e descarga para bateria TP4056;
- 1 – Chave Liga/Desliga 2 Terminais KCD11 3A 125/250V;
- 1 – Conversor USB serial FT232 ou Arduino UNO sem microcontrolador para gravar o código no Arduino Pro Mini 8Mhz;
- 1 – Buzzer ATIVO 5V (quando alimentado com 5V já faz barulho);
- 2 – Metros de fio 0.5mm² de varias cores;
- 1 – Case impressa em 3D, montada em metal ou madeira;
Case e impressão 3D:
Eu decidi fazer toda a estrutura mecânica do projeto impressa em 3D devido a popularidade cada vez maior das impressoras 3Ds, porém, você pode tranquilamente montar o seu torquimetro utilizando tubos de metal ou madeira.
Versão V2 do desenho 3D com diversas melhorias:
Clique aqui para baixar todos os arquivos do desenho 3D V2 em STL
Versão V1 do desenho 3D obsoleta:
Clique aqui para baixar todos os arquivos do desenho 3D V1 em STL
O código a ser carregado no Arduino:
Como o Arduino Pro Mini não vem com conversor USB serial temos que utilizar um gravador externo como um FT232, CH340 ou um Arduino UNO sem microcontrolador por exemplo.
Não esqueça de selecionar na IDE do Arduino o Arduino Pro Mini e depois a opção ATmega328P 8Mhz.
Abaixo segue a programação utilizada. Para carregar o código no Arduino você terá que adicionar algumas bibliotecas na IDE do Arduino e essas bibliotecas estão disponíveis aqui em baixo para download.
Biblioteca HX711;
Biblioteca RotaryEncoder;
Biblioteca Adafruit_SSD1306;
Biblioteca Adafruit GFX.
As outras bibliotecas que conta no código já são vem junto com a IDE do Arduino e não é necessário sua instalação.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 |
/********************************************* Autor: Marlon Nardi Walendorff Projeto: Faça um torquímetro com Arduino Super barato! Detalhes do projeto: https://marlonnardi.com/2022/03/18/faca-um-torquimetro-com-arduino-super-barato /**********************************************/ //==================== Inclusão de Bibliotecas =================// #include <Adafruit_SSD1306.h> #include "HX711.h" #include <Wire.h> #include <RotaryEncoder.h> #include <EEPROM.h> //==================== Mapeamento de Hardware ==================// #define pin_Encoder_DT 2 #define pin_Encoder_CLK 3 #define pin_Encoder_SW 4 #define pin_HX711_SCK 5 #define pin_HX711_DT 6 #define pin_Buzzer 7 //==================== Instânciando Objetos ====================// Adafruit_SSD1306 Display(128, 64, &Wire, -1, 400000, 400000); HX711 CelulaDeCarga; RotaryEncoder EncoderOne(pin_Encoder_CLK, pin_Encoder_DT); //==================== Variáveis Globais ==================// byte cliquesButton = 0; float valorCalibration; float valorAjusteTorque; float valorEncoder; unsigned long valorMillisInicial; unsigned long valorMillisFinal; byte aux = 0; byte aux2 = 0; long valorUnidadeMedida = 0; byte UnidadeMedida = 0; float valorEncoder_AjusteTorque_EEPROM; float valorEncoder_Ajuste_Unidade_Medida_EEPROM; float valor_Torque_KGFCM; float valor_Torque_NM; void setup() { //Inicializa o OLED 128X64 0.96 INCH com endereço I2C 0x3C Display.begin(SSD1306_SWITCHCAPVCC, 0x3C); Display.setTextColor(WHITE); //Define a cor do texto //Limpa o display, necessário para apagar a imagem inicial da adafruit Display.clearDisplay(); //Atualiza o display Display.display(); //Configura pino como entrada PULL-UP pinMode(pin_Encoder_SW, INPUT_PULLUP); pinMode(pin_Buzzer, OUTPUT); CelulaDeCarga.begin (pin_HX711_DT, pin_HX711_SCK); Serial.begin(9600); //================= Interrupção Externa ========================// /* Vincula duas interrupções externas no pino 2 e 3 nas funções ISR0 e ISR1 para garantir que o encoder sempre seja lido com prioridade. */ attachInterrupt(digitalPinToInterrupt(2), ISR0, CHANGE); attachInterrupt(digitalPinToInterrupt(3), ISR1, CHANGE); EEPROM.get(0, valorEncoder_AjusteTorque_EEPROM); EEPROM.put(0, valorEncoder_AjusteTorque_EEPROM); EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); EEPROM.put(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); EEPROM.get(20, valorCalibration); EEPROM.put(20, valorCalibration); CelulaDeCarga.set_scale(valorCalibration); CelulaDeCarga.tare(); Display.setTextSize(1); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(0, 0); Display.print("Acesse o projeto em:"); Display.setTextSize(1); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(0, 25); Display.print("marlonnardi.com"); Display.display(); delay(2000); Display.clearDisplay(); Display.display(); } void loop() { Seleciona_Tela(); } //================== ISRs Interrupções Externas =======================// /* Caso qualquer pino do encoder envie sinal, o metodo .tick() sempre será chamado, atualizando o valor do encoder via sua biblioteca. */ void ISR0()// Função ligada a uma interrupção ISR logo não pode retornar valor e deve ser mais rápida possível { EncoderOne.tick();// Começa a ler o valor do encoder }//-------------------------endISR0 void ISR1()// Função ligada a uma interrupção ISR logo não pode retornar valor e deve ser mais rápida possível { EncoderOne.tick();// Começa a ler o valor do encoder }//------------------------endISR1 void Seleciona_Tela() { if (digitalRead(pin_Encoder_SW)) //Se o botão está solto { valorMillisInicial = millis(); } if (digitalRead(pin_Encoder_SW) && cliquesButton > 0) //Se o botão está solto { aux = 1; } if (!digitalRead(pin_Encoder_SW) && aux == 1) ////Se o botão foi pressionado { cliquesButton = 0; aux = 0; } if (!digitalRead(pin_Encoder_SW)) ////Se o botão foi pressionado { EEPROM.put(0, valorEncoder_AjusteTorque_EEPROM); EEPROM.put(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (aux2 == 1) { CelulaDeCarga.tare(); aux2 = 0; } valorMillisFinal = millis(); if ((valorMillisFinal - valorMillisInicial) >= 500 && (valorMillisFinal - valorMillisInicial) <= 600) { EncoderOne.setPosition(0); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); cliquesButton = 1; } if ((valorMillisFinal - valorMillisInicial) >= 1500 && (valorMillisFinal - valorMillisInicial) <= 1600) { EEPROM.get(0, valorEncoder_AjusteTorque_EEPROM); EncoderOne.setPosition(valorEncoder_AjusteTorque_EEPROM); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); cliquesButton = 2; } if ((valorMillisFinal - valorMillisInicial) >= 4000 && (valorMillisFinal - valorMillisInicial) <= 4100) { EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); EncoderOne.setPosition(valorEncoder_Ajuste_Unidade_Medida_EEPROM); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); cliquesButton = 3; } if ((valorMillisFinal - valorMillisInicial) >= 7000 && (valorMillisFinal - valorMillisInicial) <= 7100) { digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); digitalWrite(pin_Buzzer, HIGH); delay(100); digitalWrite(pin_Buzzer, LOW); delay(100); cliquesButton = 4; } } switch (cliquesButton) { case 0: Tela_Torque(); break; case 1: Tela_Tara(); break; case 2: Tela_Ajuste_Torque(); break; case 3: Tela_KGFM_NM(); break; case 4: Tela_Calibration(); break; } } //============================================= Tela_Tara() ===============================// void Tela_Tara() { Display.clearDisplay(); Display.setTextSize(3); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(45, 25); //Posição Largura/Altura Display.setCursor(20, 0); Display.print("Tara?"); if (EncoderOne.getPosition() <= 0) { //Posição Largura/Altura Display.setCursor(45, 35); Display.print("NO"); aux2 = 0; EncoderOne.setPosition(0); } else { //Posição Largura/Altura Display.setCursor(35, 35); Display.print("YES"); aux2 = 1; EncoderOne.setPosition(1); } Display.display(); } //============================================= Tela_Torque()===============================// void Tela_Torque() { Display.clearDisplay(); Display.setTextSize(2); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(0, 0); valorAjusteTorque = valorEncoder_AjusteTorque_EEPROM / 10; EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (!valorEncoder_Ajuste_Unidade_Medida_EEPROM) //kgF.m { Display.print(valorAjusteTorque / 9.81, 2); } if (valorEncoder_Ajuste_Unidade_Medida_EEPROM) //N.m { Display.print(valorAjusteTorque, 1); } Display.setTextSize(4); //--------------- Valor Torque em kgF.m --------------------// EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (!valorEncoder_Ajuste_Unidade_Medida_EEPROM) { EEPROM.get(20, valorCalibration); if (CelulaDeCarga.get_units() > 0) { if (CelulaDeCarga.get_units() >= 10) { //Posição Largura/Altura Display.setCursor(18, 26); Display.print(CelulaDeCarga.get_units(), 2); } else { //Posição Largura/Altura Display.setCursor(15, 26); Display.print(CelulaDeCarga.get_units(), 2); } } else { if (CelulaDeCarga.get_units() <= -10) { //Posição Largura/Altura Display.setCursor(0, 26); Display.print(CelulaDeCarga.get_units(), 2); } else { //Posição Largura/Altura Display.setCursor(0, 26); Display.print(CelulaDeCarga.get_units(), 2); } } } //--------------- Valor Torque em N.m --------------------// EEPROM.get(20, valorCalibration); EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (valorEncoder_Ajuste_Unidade_Medida_EEPROM) { if (CelulaDeCarga.get_units() * 9.81 > 0) { if ((CelulaDeCarga.get_units() * 9.81) >= 10) { //Posição Largura/Altura Display.setCursor(15, 26); Display.print(((CelulaDeCarga.get_units() * 9.81)), 1); } else { //Posição Largura/Altura Display.setCursor(30, 26); Display.print(((CelulaDeCarga.get_units() * 9.81)), 1); } } else { if ((CelulaDeCarga.get_units() * 9.81) <= -10) { //Posição Largura/Altura Display.setCursor(5, 26); Display.print(((CelulaDeCarga.get_units() * 9.81)), 1); } else { //Posição Largura/Altura Display.setCursor(10, 26); Display.print(((CelulaDeCarga.get_units() * 9.81)), 1); } } } Display.setTextSize(2); EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (!valorEncoder_Ajuste_Unidade_Medida_EEPROM) { Display.setCursor(60, 0); Display.print("kgF.m"); if (digitalRead(pin_Encoder_SW)) { EEPROM.get(0, valorEncoder_AjusteTorque_EEPROM); if ((CelulaDeCarga.get_units()) >= ((valorEncoder_AjusteTorque_EEPROM / 10) / 9.81) || CelulaDeCarga.get_units() <= (-1 * ((valorEncoder_AjusteTorque_EEPROM / 10) / 9.81))) { digitalWrite(pin_Buzzer, HIGH); } else { digitalWrite(pin_Buzzer, LOW); } } } if (valorEncoder_Ajuste_Unidade_Medida_EEPROM) { Display.setCursor(63, 0); Display.print("N.m"); if (digitalRead(pin_Encoder_SW)) { EEPROM.get(0, valorEncoder_AjusteTorque_EEPROM); if ((CelulaDeCarga.get_units()) * 9.81 >= ((valorEncoder_AjusteTorque_EEPROM / 10)) || (CelulaDeCarga.get_units()) * 9.81 <= (-1 * (valorEncoder_AjusteTorque_EEPROM / 10))) { digitalWrite(pin_Buzzer, HIGH); } else { digitalWrite(pin_Buzzer, LOW); } } } Display.display(); }//-----endTelaTorque //============================================= Tela_Ajuste_Torque() ===============================// void Tela_Ajuste_Torque() { valorEncoder = EncoderOne.getPosition();//Captura o valor do encoder valorEncoder_AjusteTorque_EEPROM = valorEncoder; valorAjusteTorque = (valorEncoder / 10); if (valorAjusteTorque < 0.0) { EncoderOne.setPosition(0); } if (valorAjusteTorque > 30.0) { EncoderOne.setPosition(300); } Display.clearDisplay(); Display.setTextSize(4); EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (!valorEncoder_Ajuste_Unidade_Medida_EEPROM) //kgF.m { if (valorAjusteTorque >= 10) { //Posição Largura/Altura Display.setCursor(15, 26); Display.print(valorAjusteTorque / 9.81, 2); } else { //Posição Largura/Altura Display.setCursor(30, 26); Display.print(valorAjusteTorque / 9.81, 2); } } if (valorEncoder_Ajuste_Unidade_Medida_EEPROM) //N.m { if (valorAjusteTorque >= 10) { //Posição Largura/Altura Display.setCursor(15, 26); Display.print(valorAjusteTorque, 1); } else { //Posição Largura/Altura Display.setCursor(30, 26); Display.print(valorAjusteTorque, 1); } } Display.setTextSize(2); Display.setCursor(0, 0); Display.print("Conf."); EEPROM.get(10, valorEncoder_Ajuste_Unidade_Medida_EEPROM); if (!valorEncoder_Ajuste_Unidade_Medida_EEPROM) { Display.setCursor(60, 0); Display.print("kgF.m"); } if (valorEncoder_Ajuste_Unidade_Medida_EEPROM) { Display.setCursor(63, 0); Display.print("N.m"); } Display.display(); }//---endTela_Ajuste_Torque //============================================= Tela_KGFM_NM() ===============================// void Tela_KGFM_NM() { EEPROM.get(10, valorEncoder); valorEncoder = EncoderOne.getPosition();//Captura o valor do encoder valorEncoder_Ajuste_Unidade_Medida_EEPROM = valorEncoder; valorUnidadeMedida = valorEncoder; if (valorUnidadeMedida < 0) { // kgF.m UnidadeMedida = 0; EncoderOne.setPosition(0); } if (valorUnidadeMedida > 1) { // N.m UnidadeMedida = 1; EncoderOne.setPosition(1); } Display.clearDisplay(); //Posição Largura/Altura Display.setTextSize(3); if (!UnidadeMedida) { Display.setCursor(18, 26); Display.print("kgF.m"); } if (UnidadeMedida) { Display.setCursor(35, 26); Display.print("N.m"); } Display.display(); } //============================================= Tela_Calibration() ===============================// void Tela_Calibration() { //39,5 cm ou 395mm - 2kg Display.clearDisplay(); Display.setTextSize(1); //Posição Largura/Altura Display.setCursor(0, 0); Display.print("Calibration"); Display.setCursor(0, 20); Display.print("2 kgf a 39.5 cm do eixo"); Display.display(); delay(5000); //0,79 kgF.m ou 7,9N.m valorCalibration = (CelulaDeCarga.get_value() / 0.79); EEPROM.put(20, valorCalibration); CelulaDeCarga.set_scale(valorCalibration); Serial.print("valorCalibration: "); Serial.println(valorCalibration); cliquesButton = 0; } |
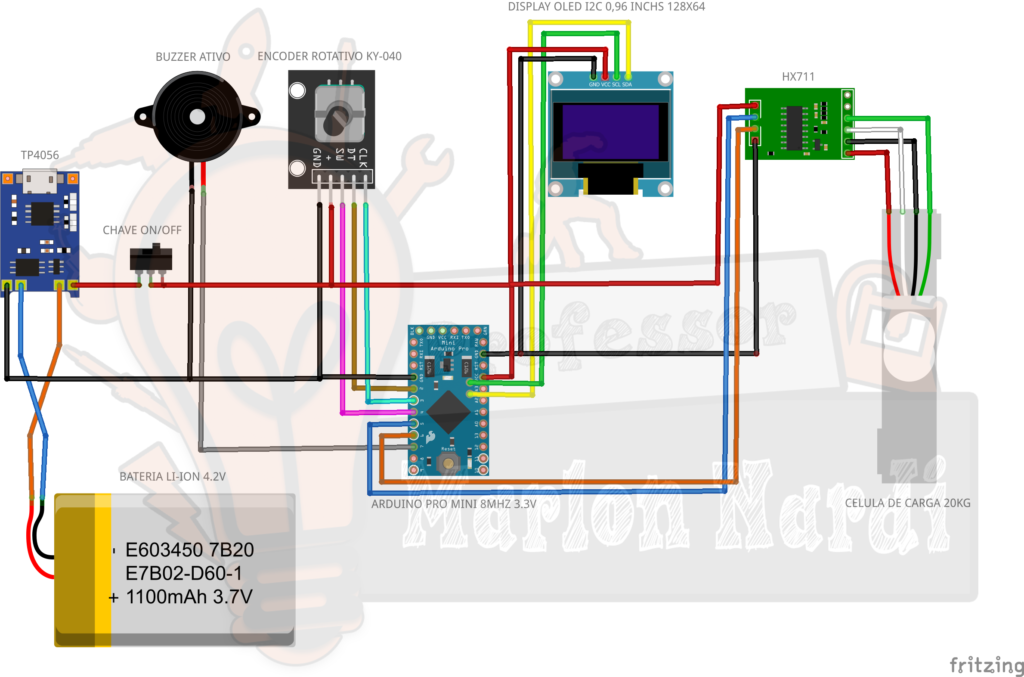
Logo abaixo o circuito que deve ser montado:
Para abrir a imagem em alta resolução clique aqui e utilize o zoom.
No vídeo abaixo você encontra o passo a passo para montar o projeto: