Agitador percloreto de ferro para PCIs (Placas de circuito impresso) com Arduino
O processo de corrosão de uma placa de circuito impresso PCI/PCB com percloreto de ferro é lento, mas com esse projeto você faz isso 3X mais rápido!
A seguir temos a lista de materiais necessários:
- 1 – Arduino NANO;
- 1 – Módulo Encoder Rotativo KY-040;
- 1 – Knob para encoder;
- 1 – Display OLED I2C 0.96Inch 128×64;
- 1 – Motor de passo 28BYJ-48 com placa driver;
- 1 – Conector tipo Jack;
- 1 – Fonte 5V x 1A;
- 1 – Buzzer ativo 5V;
- 4 – Imãs neodímio 10mm de diâmetro e 4mm de espessura;
- 4 – Pés de silicone;
- 2 – Parafusos rosca máquina 4mm espessura x 10mm comprimento com duas porcas auto travante (para fixar o motor de passo);
- 2 – Parafusos rosca soberba 2,2mm espessura x 12mm comprimento (para fixar o eixo da gangorra);
- 2 – Parafusos rosca soberba 2,2mm espessura x 8mm comprimento (para fixar o eixo da biela);
- Pelo menos 1 metro de fio elétrico 0,25mm²;
- Vaselina sólida para lubrificação das peças plásticas com atrito;
- Peças impressas em 3D ou feitas de papelão ou madeira;
Case e impressão 3D:
Clique aqui para baixar o desenho .STL da versão V1 do agitador de percloreto de ferro para PCI
O código a ser carregado:
Abaixo segue a programação utilizada. Para carregar o código no Arduino você terá que adicionar algumas bibliotecas na IDE do Arduino e essas bibliotecas estão disponíveis aqui em baixo para download. O resto das bibliotecas utilizadas são nativas da IDE do Arduino e não precisam ser instaladas a parte.
Biblioteca Adafruit_SSD1306;
Biblioteca RotaryEncoder;
Biblioteca TimerOne;
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 |
/********************************************* Autor: Marlon Nardi Walendorff Projeto: Agitador percloreto de ferro para PCIs (Placas de circuito impresso) com Arduino Detalhes do projeto: https://marlonnardi.com/2022/12/03/agitador-percloreto-de-ferro-para-pcis-placas-de-circuito-impresso-com-arduino/ /**********************************************/ //==================== Inclusão de Bibliotecas =================// #include <Adafruit_SSD1306.h> #include <RotaryEncoder.h> #include <Stepper.h> #include <TimerOne.h> //==================== Mapeamento de Hardware ==================// #define pin_Encoder_DT 2 #define pin_Encoder_CLK 3 #define pin_Encoder_SW 4 #define pin_Motor_de_Passo_1 8 #define pin_Motor_de_Passo_2 6 #define pin_Motor_de_Passo_3 7 #define pin_Motor_de_Passo_4 5 #define pin_Buzzer 9 #define tempo_inicial 10 //==================== Variáveis Globais ==================// int stepCount = 0; volatile byte cliquesButton = 0; long tempo_ajustado_minutos = 0; volatile long tempo_decorrido_decimos_segundo; long tempo_ajustado_minutos_display = 0; long tempo_decorrido_minutos_display = 0; volatile long tempo_decorrido_minutos = 0; const int passos_por_volta = 200; unsigned const int velocidade_motor = 110; volatile unsigned int tempo_button = 0; byte aux = 0; byte aux2 = 0; byte aux3 = 0; //==================== Instânciando Objetos ====================// Adafruit_SSD1306 Display(128, 64, &Wire, -1, 400000, 400000); RotaryEncoder EncoderOne(pin_Encoder_CLK, pin_Encoder_DT); Stepper motor_de_passo(passos_por_volta, pin_Motor_de_Passo_1, pin_Motor_de_Passo_2, pin_Motor_de_Passo_3, pin_Motor_de_Passo_4); void setup() { Timer1.initialize(100000); // Configura um timer com tempo de 100000 microseconds ou 0.1 segundo Timer1.attachInterrupt(timerIsr); //Vincula a ISR timersIsr a interrupção. //Inicializa o OLED 128X64 0.96 INCH com endereço I2C 0x3C Display.begin(SSD1306_SWITCHCAPVCC, 0x3C); Display.setTextColor(WHITE); //Define a cor do texto //Limpa o display, necessário para apagar a imagem inicial da adafruit Display.clearDisplay(); //Atualiza o display Display.display(); //Configura pino como entrada PULL-UP pinMode(pin_Encoder_SW, INPUT_PULLUP); pinMode(pin_Buzzer, OUTPUT); Serial.begin(9600); //================= Interrupção Externa ========================// /* Vincula duas interrupções externas no pino 2 e 3 nas funções ISR0 e ISR1 para garantir que o encoder sempre seja lido com prioridade. */ attachInterrupt(digitalPinToInterrupt(2), ISR0, CHANGE); attachInterrupt(digitalPinToInterrupt(3), ISR1, CHANGE); EncoderOne.setPosition(tempo_inicial); Display.setTextSize(1); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(0, 0); Display.print("Acesse o projeto em:"); Display.setTextSize(1); //Define o tamanho da fonte do texto //Posição Largura/Altura Display.setCursor(0, 25); Display.print("marlonnardi.com"); Display.display(); delay(2000); Display.clearDisplay(); Display.display(); }//----------------endSetup void loop() { if (cliquesButton == 0) tempo_ajustado_minutos = EncoderOne.getPosition(); //Captura o valor do encoder if (EncoderOne.getPosition() <= 0) { EncoderOne.setPosition(0); } if (EncoderOne.getPosition() > 59) { EncoderOne.setPosition(59); } //================= Captura cliques encoder =====================// if (!digitalRead(pin_Encoder_SW) && tempo_button == 0) //Se o botão foi pressionado { aux = 1; } if (digitalRead(pin_Encoder_SW) && aux == 1 )//Se o botão está solto { cliquesButton++; aux = 0; } if (tempo_ajustado_minutos >= 0 && tempo_ajustado_minutos < 60 && tempo_button < 10) // Não permite aparecer no display números maiores que 59 nem menores que 0 { //================= Tela Ajuste tempo em Minutos =====================// if (cliquesButton == 0) { Display.clearDisplay(); Display.setTextSize(2); //Posição Largura/Altura Display.setCursor(23, 0); Display.print("Minutos:"); Display.setTextSize(4); if (tempo_ajustado_minutos >= 10) { //Posição Largura/Altura Display.setCursor(43, 26); Display.print(tempo_ajustado_minutos); } else { //Posição Largura/Altura Display.setCursor(58, 26); Display.print(tempo_ajustado_minutos); } Display.display(); tempo_decorrido_decimos_segundo = tempo_ajustado_minutos * 600; } //================= Tela tempo decorido em Minutos =====================// if (cliquesButton == 1) { tempo_decorrido_minutos = tempo_decorrido_decimos_segundo / 600; if (tempo_decorrido_minutos != tempo_decorrido_minutos_display) { Display.clearDisplay(); Display.setTextSize(2); //Posição Largura/Altura Display.setCursor(0, 0); Display.print("Agitando.."); //====================== Digito Minutos =============================// Display.setTextSize(4); if (tempo_decorrido_minutos >= 10) { //Posição Largura/Altura Display.setCursor(43, 26); Display.print(tempo_decorrido_minutos); } else { //Posição Largura/Altura Display.setCursor(58, 26); Display.print(tempo_decorrido_minutos); } Display.display(); tempo_decorrido_minutos_display = tempo_decorrido_minutos; } } } if (cliquesButton > 1) { cliquesButton = 0; } if (cliquesButton == 1) { motor_de_passo.setSpeed(velocidade_motor); motor_de_passo.step(2); } Serial.println(tempo_decorrido_decimos_segundo); if (tempo_decorrido_decimos_segundo <= 0 && cliquesButton == 1) { Display.clearDisplay(); Display.setTextSize(2); //Posição Largura/Altura Display.setCursor(0, 0); Display.print("Agitando.."); Display.setTextSize(4); if (tempo_decorrido_minutos >= 10) { //Posição Largura/Altura Display.setCursor(43, 26); Display.print(tempo_decorrido_minutos); } else { //Posição Largura/Altura Display.setCursor(58, 26); Display.print(tempo_decorrido_minutos); } Display.display(); digitalWrite(pin_Buzzer, HIGH); delay(4000); digitalWrite(pin_Buzzer, LOW); cliquesButton = 0; } //================= Se o encoder foi pressionado por 1 segundo =====================// if (tempo_button >= 10) { motor_de_passo.setSpeed(velocidade_motor); motor_de_passo.step(2); aux = 0; } }//-------------------------endLOOP //================== ISR Interrupção Interna Timer1 =======================// void timerIsr() { if (cliquesButton == 1 && tempo_decorrido_decimos_segundo > 0) { tempo_decorrido_decimos_segundo--; } if (!digitalRead(pin_Encoder_SW)) { tempo_button++; } else { tempo_button = 0; } }//---------endtimeIsr //================== ISRs Interrupções Externas =======================// /* Caso qualquer pino do encoder envie sinal, o metodo .tick() sempre será chamado, atualizando o valor do encoder via sua biblioteca. */ void ISR0()// Função ligada a uma interrupção ISR logo não pode retornar valor e deve ser mais rápida possível { if (cliquesButton == 0) EncoderOne.tick(); // Começa a ler o valor do encoder }//-------------------------endISR0 void ISR1()// Função ligada a uma interrupção ISR logo não pode retornar valor e deve ser mais rápida possível { if (cliquesButton == 0) EncoderOne.tick(); // Começa a ler o valor do encoder }//------------------------endISR1 |
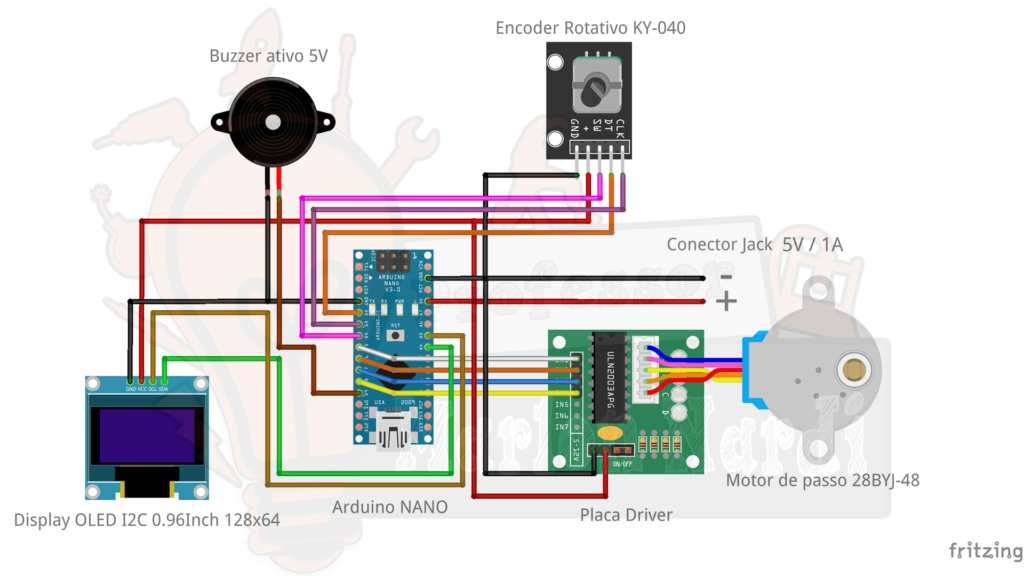
O circuito eletrônico:
Para ver a imagem do circuito em alta resolução clique aqui
Veja o projeto completo logo abaixo: